Yandex Software-Defined LiDAR
- Видео
- О видео
- Скачать
- Поделиться
Yandex Software-Defined LiDAR
14, 536 | 4 год. назад | 168 - 0
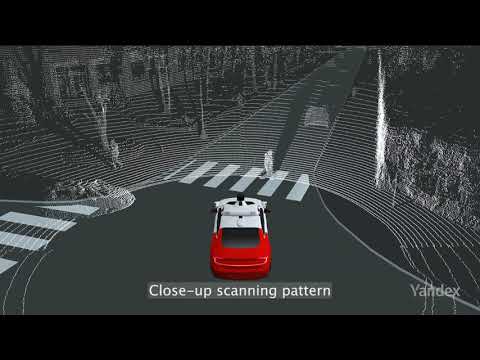
This video outlines our software-defined approach to using the main lidar. At the beginning of the video, you will see our system using a standard scanning pattern. However, once the car pulls in to a narrow side street filled with pedestrians, the system switches to a close-up scanning pattern. Later, as the car pulls out onto a large, multi-lane highway, the system moves to a long-range scanning pattern in order to better identify objects in the distance.
This video depicts the point cloud from the central lidar only. Each self-driving vehicle is equipped with additional lidars to detect small and medium-sized objects directly in front of, or beside, the car.
Find out more about software-defined lidar in our blog:
В этом видео показано, как работает гибкая настройка параметров при использовании главного лидара.
В начале система использует стандартный паттерн сканирования. При въезде на узкую улицу с активным пешеходным движением она фокусирует основную часть лучей перед автомобилем. Когда беспилотник выезжает на многополосный проспект, система переключает фокусировку на дальнее расстояние для большей детализации объектов, находящихся вдалеке от автомобиля.
В видео показано облако точек только с центрального лидара. Каждый беспилотный автомобиль оснащен также дополнительными лидарами по бокам и в передней части, для детекций небольших объектов около автомобиля.
Подробнее о нашем лидаре читайте в блоге Яндекса:
Чтобы скачать видео "Yandex Software-Defined LiDAR" передвинте ползунок вправо
- Комментарии
Комментарии ФБ